Application - Design
Main Application Page
The Original Design Specification
Project Definition
The world's first robotic car-park attendant. The robot will perform circuits of a car-park
and, by means of a camera, read the number plates of the cars that are parked there. It will
then be able to identify cars which have exceeded their time limit, or cars which are not
authorised to park in the car park. It will be completely wireless, communicating to a
centrally placed base-station via a bluetooth link.
This idea extends to a more general image-recognition problem which could be used in
different applications. For example, an automatic robotic shopper which can distinguish
between different products and brands by looking at their labels.
Core Tasks - Stage 1
The following tasks are required to allow the robot to identify number plates.
- Integrate a camera into the robot.
- ??(If necessary) Integrate a light into the robot to enable it to successfully
capture images of number plates.
- Implement a recognition program that enables automatic extraction of vehicle
registration numbers from the captured number plate images.
If the registration number extraction program is to be run on the base-station rather than
the robot we will also need to implement transmission of images from the robot to the
base-station.
Core Tasks - Stage 2
The following tasks are required to enable the robot to make circuits of the car park of
its own accord.
- Implement a loop to make the robot repeatedly move forward a certain distance, take
a picture of a number plate,and extract the registration number from that picture.
- Implement a program to make the robot follow a set route, recording all the vehicle
registrations it encounters on the way.
Core Tasks - Stage 3
Finally we must implement a scheme to identify registrations that have been in the car-park
for too long, or are not authorised to be there at all. (Using a database??) We must also
decide on an appropriate action to be taken and implement it - one suggestion is to SMS message
a human attendants mobile phone.
Optional Extras
- Implement a scheme that allows a human operator to input a new route for the robot to
follow.
- Implement some sensory scheme that allows the robot to detect and avoid hazards (for example
moving cars!)
Some Idealistic Assumptions we may have to make
- Car number plates will always be clean. [Isn't this a legal requirement? - Mark]
- There will be no physical hazards for the robot to worry about.
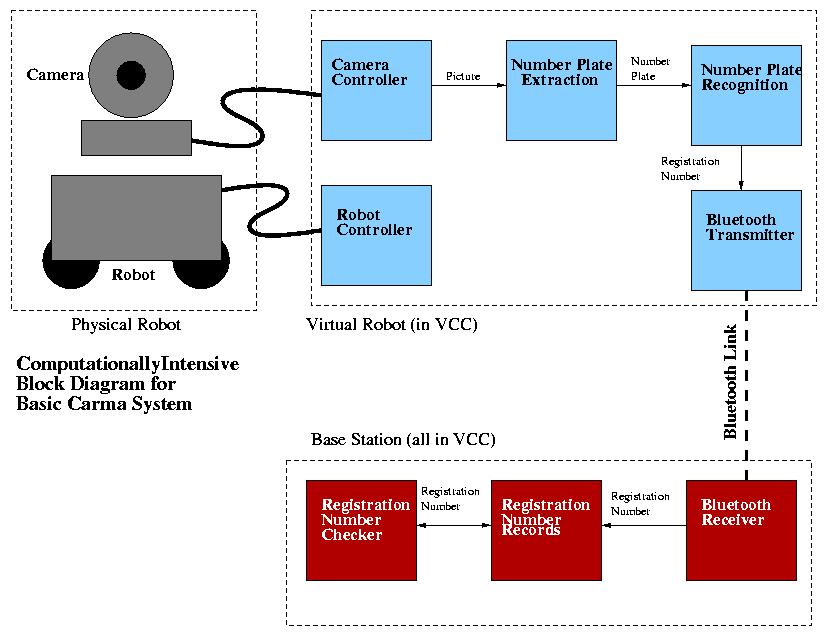
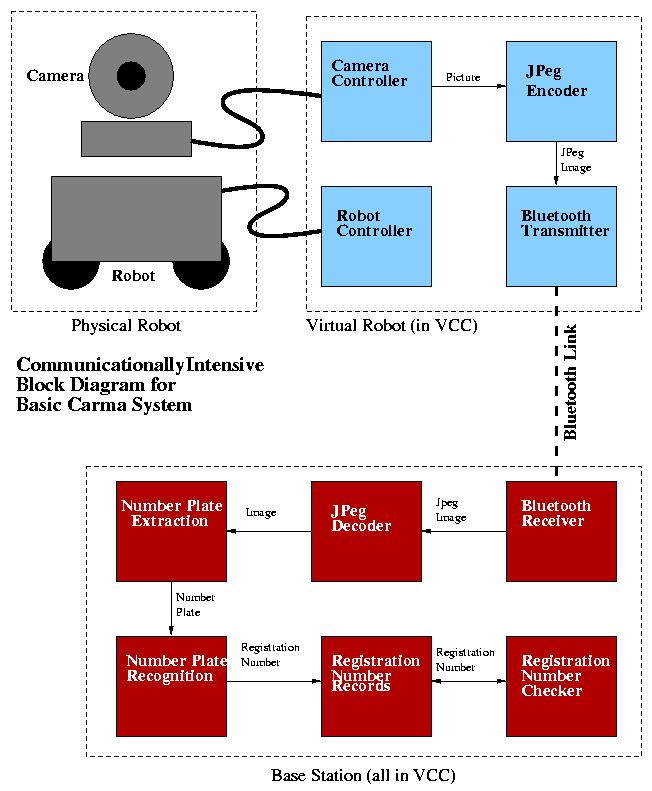
Computation Vs. Communication
It was further decided to implement two versions of the system. The system lends itself to two approaches - computationally intensive, in which the processing of images is done on the robot, and communicationally intensive, in which the robot transmits the image to the base-station for processing there. Below are the high-level block diagrams for the two versions of the system.