On the final day of the term Alan finally managed to successfully implement the application behaviour with the Bluetooth behaviour. This has given me a significantly larger behaviour to work with.
Given the previous results of the Application and Bluetooth mappings independantly it was decided that trying to seriously map this behaviour was probably a waste of time. Being it the last day of term, there was very little time to do so, anyway. Consequently, there are no concrete results at all for this section of the report. Instead, there is simply the mapping shown below which, given the experience of the mappings shown previously which do have some results, should be at the very least a reasonable 'first attempt' at mapping the Bluetooth-enabled application behaviours.
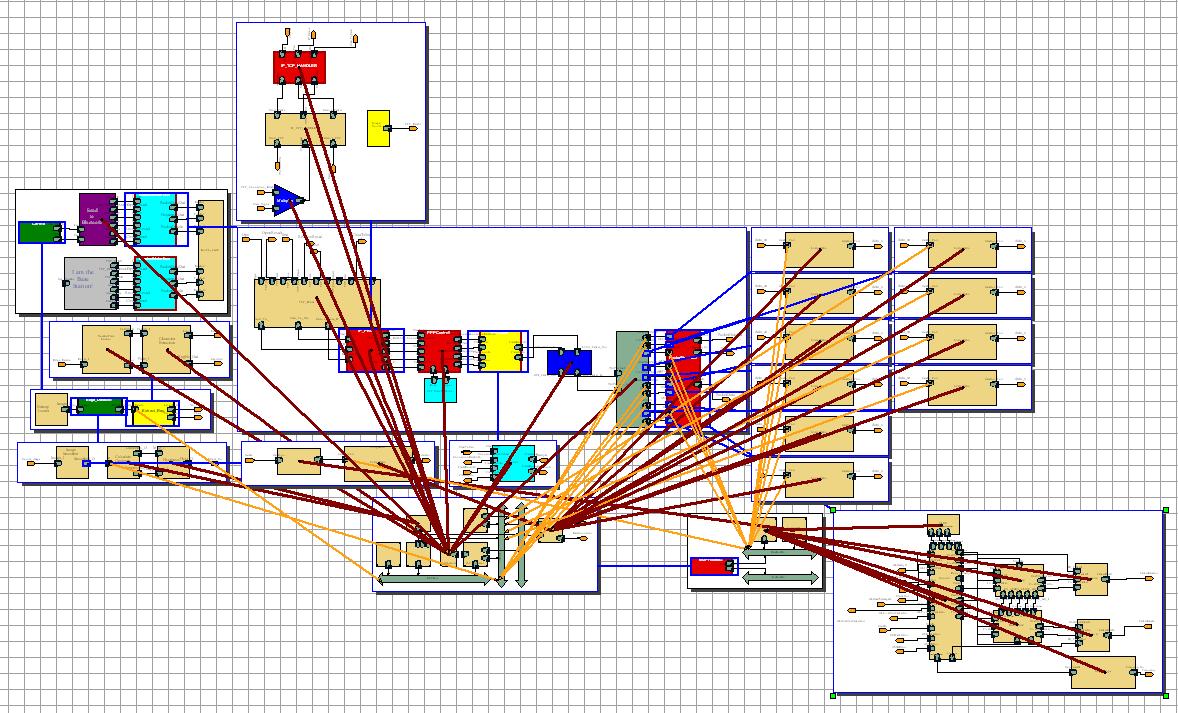
You could be forgiven for thinking this looks horrendously complicated, however it should not be too hard to explain the thinking behind these mappings.
This should give a reasonable starting point for improving the mapping of the entire system to find the optimal setup. It should be noted, however, that even this would not be the entire of our application. There is no mention so far of robot control or camera control, both of which would be an important part of the whole system, and would also require to be simulated to balance the processor loads as a whole.