The System Level Integration Practical Group C application is that of a robotic carpark attendant, known as CARMA. The CARMA system has been designed as a set of behaviours in the Cadence tool Virtual Component Co-design (VCC). The essential sections of our application involve the use of robot control libraries, camera control libraries and image processing with character recognition.
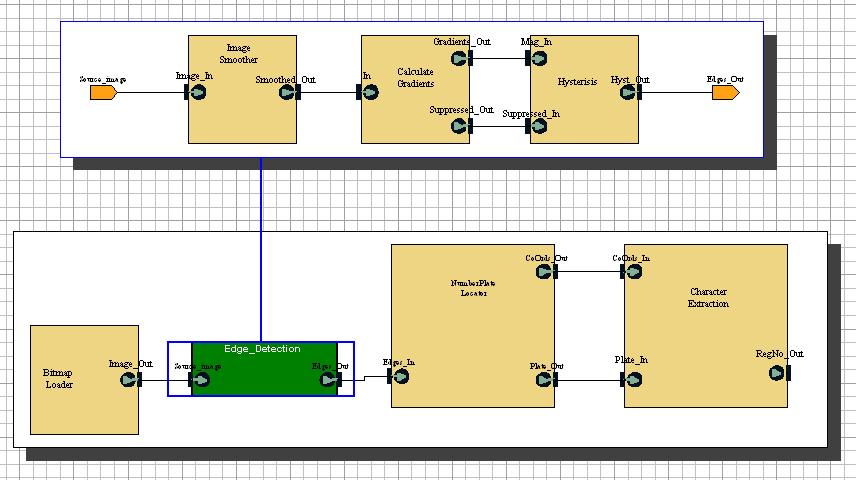
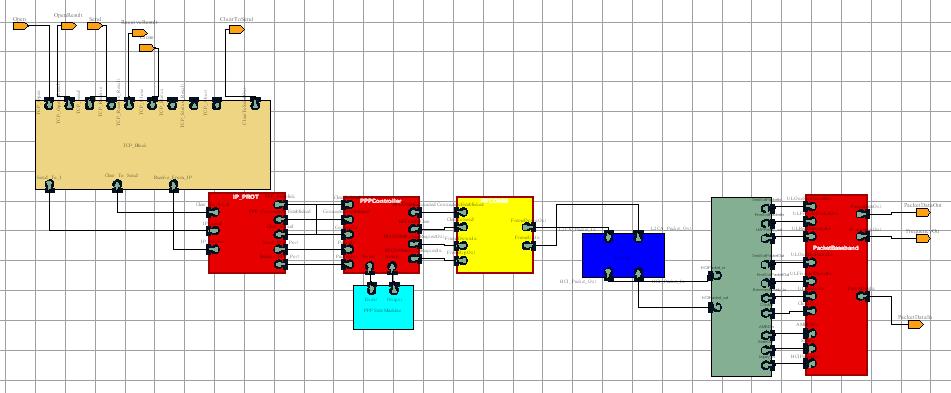
The numberplate recognition section of our application has been successfully realised in VCC by the application programmer, Alan Stanley. This is shown in Fig 1. There is a description of the functions of each of the blocks here. Also, there is a Bluetooth TCP/IP implementation realised by the Bluetooth Development Group. This is shown in Fig. 2. The results are the VCC behaviours shown below. These behaviours now need to be mapped to a model of the SH2 architecture specified for our project. A mapping is where the behaviour is related to a hardware architecture in VCC. This allows the VCC software to simulate the instructions generated by the software code running on the target hardware for the project. Running performance evaluations on these mappings should give meaningful and realistic results showing the performance timings of the software running on the platform hardware. Experimentation can also take place to compare on hardware/software configuration against another, giving comparable results to find the optimal hardware setup. This work is undertaken by the platform developers who, in Group C consist of just one person, Peter Johnston.
A (somewhat haphazard) diary of the order of events as they happened through the course of the project can be found here.